rkt architecture
Overview
rkt's primary interface is a command-line tool, rkt, which does not require a long running daemon.
This architecture allows rkt to be updated in-place without affecting application containers which are currently running.
It also means that levels of privilege can be separated out between different operations.
All state in rkt is communicated via the filesystem.
Facilities like file-locking are used to ensure co-operation and mutual exclusion between concurrent invocations of the rkt command.
Stages
Execution with rkt is divided into several distinct stages.
NB The goal is for the ABI between stages to be relatively fixed, but while rkt is still under heavy development this is still evolving.
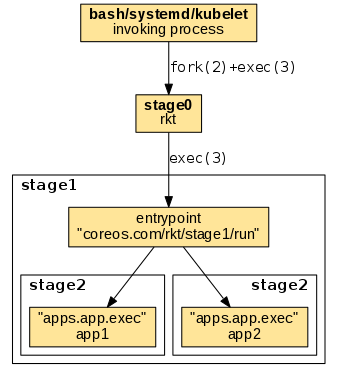
After calling rkt the execution chain follows the numbering of stages, having the following general order:
-
invoking process -> stage0: The invoking process uses its own mechanism to invoke the rkt binary (stage0). When started via a regular shell or a supervisor, stage0 is usually forked and exec'ed becoming a child process of the invoking shell or supervisor.
-
stage0 -> stage1: An ordinary
exec(3)is being used to replace the stage0 process with the stage1 entrypoint. The entrypoint is referenced by thecoreos.com/rkt/stage1/runannotation in the stage1 image manifest. -
stage1 -> stage2: The stage1 entrypoint uses its mechanism to invoke the stage2 app executables. The app executables are referenced by the
apps.app.execsettings in the stage2 image manifest.
The details of the execution flow varies across the different stage1 implementations.
Stage 0
The first stage is the actual rkt binary itself.
When running a pod, this binary is responsible for performing a number of initial preparatory tasks:
- Fetching the specified ACIs, including the stage1 ACI of --stage1-{url,path,name,hash,from-dir} if specified.
- Generating a Pod UUID
- Generating a Pod Manifest
- Creating a filesystem for the pod
- Setting up stage1 and stage2 directories in the filesystem
- Unpacking the stage1 ACI into the pod filesystem
- Unpacking the ACIs and copying each app into the stage2 directories
Given a run command such as:
# rkt run app1.aci app2.aci
a pod manifest compliant with the ACE spec will be generated, and the filesystem created by stage0 should be:
/pod
/stage1
/stage1/manifest
/stage1/rootfs/init
/stage1/rootfs/opt
/stage1/rootfs/opt/stage2/${app1-name}
/stage1/rootfs/opt/stage2/${app2-name}
where:
podis the pod manifest filestage1is a copy of the stage1 ACI that is safe for read/writestage1/manifestis the manifest of the stage1 ACIstage1/rootfsis the rootfs of the stage1 ACIstage1/rootfs/initis the actual stage1 binary to be executed (this path may vary according to thecoreos.com/rkt/stage1/runannotation of the stage1 ACI)stage1/rootfs/opt/stage2are copies of the unpacked ACIs
At this point the stage0 execs /stage1/rootfs/init with the current working directory set to the root of the new filesystem.
Stage 1
The next stage is a binary that the user trusts, and has the responsibility of taking the pod filesystem that was created by stage0, create the necessary container isolation, network, and mounts to launch the pod. Specifically, it must:
- Read the Image and Pod Manifests. The Image Manifest defines the default
execspecifications of each application; the Pod Manifest defines the ordering of the units, as well as any overrides. - Set up/execute the actual isolation environment for the target pod, called the "stage1 flavor". Currently there are three flavors implemented:
- fly: a simple chroot only environment.
- systemd/nspawn: a cgroup/namespace based isolation environment using systemd, and systemd-nspawn.
- kvm: a fully isolated kvm environment.
There are also out of tree stage1:
- stage1-xen, stage1 based on the Xen hypervisor
- volo, stage1 written in Rust, akin to stage1-fly
- docker-skim, a weaker version of stage1-fly using LD_PRELOAD tricks instead of chroot
- dgr/aci-builder, a stage1 used internally by the container build and runtime tool dgr
- stage1-builder, scripts and tools to generate KVM-based stage1 with customized Linux kernels
Stage 2
The final stage, stage2, is the actual environment in which the applications run, as launched by stage1.
Flavors
systemd/nspawn flavors
The "host", "src", and "coreos" flavors (referenced to as systemd/nspawn flavors) use systemd-nspawn, and systemd to set up the execution chain.
They include a very minimal systemd that takes care of launching the apps in each pod, apply per-app resource isolators and makes sure the apps finish in an orderly manner.
These flavors will:
- Read the image and pod manifests
- Generate systemd unit files from those Manifests
- Create and enter network namespace if rkt is not started with --net=host
- Start systemd-nspawn (which takes care of the following steps)
- Set up any external volumes
- Launch systemd as PID 1 in the pod within the appropriate cgroups and namespaces
- Have systemd inside the pod launch the app(s).
This process is slightly different for the qemu-kvm stage1 but a similar workflow starting at exec()'ing kvm instead of an nspawn.
We will now detail how the starting, shutdown, and exit status collection of the apps in a pod are implemented internally.
Immutable vs. mutable pods
rkt supports two kinds of pod runtime environments: an immutable pod runtime environment, and a new, experimental mutable pod runtime environment.
The immutable runtime environment is currently the default, i.e. when executing any rkt prepare or rkt run command.
Once a pod has been created in this mode, no modifications can be applied.
Conversely, the mutable runtime environment allows users to add, remove, start, and stop applications after a pod has been started.
Currently this mode is only available in the experimental rkt app family of subcommands; see the app pod lifecycle documentation for a more detailed description.
Both runtime environments are supervised internally by systemd, using a custom dependency graph. The differences between both dependency graphs are described below.
Immutable runtime environment
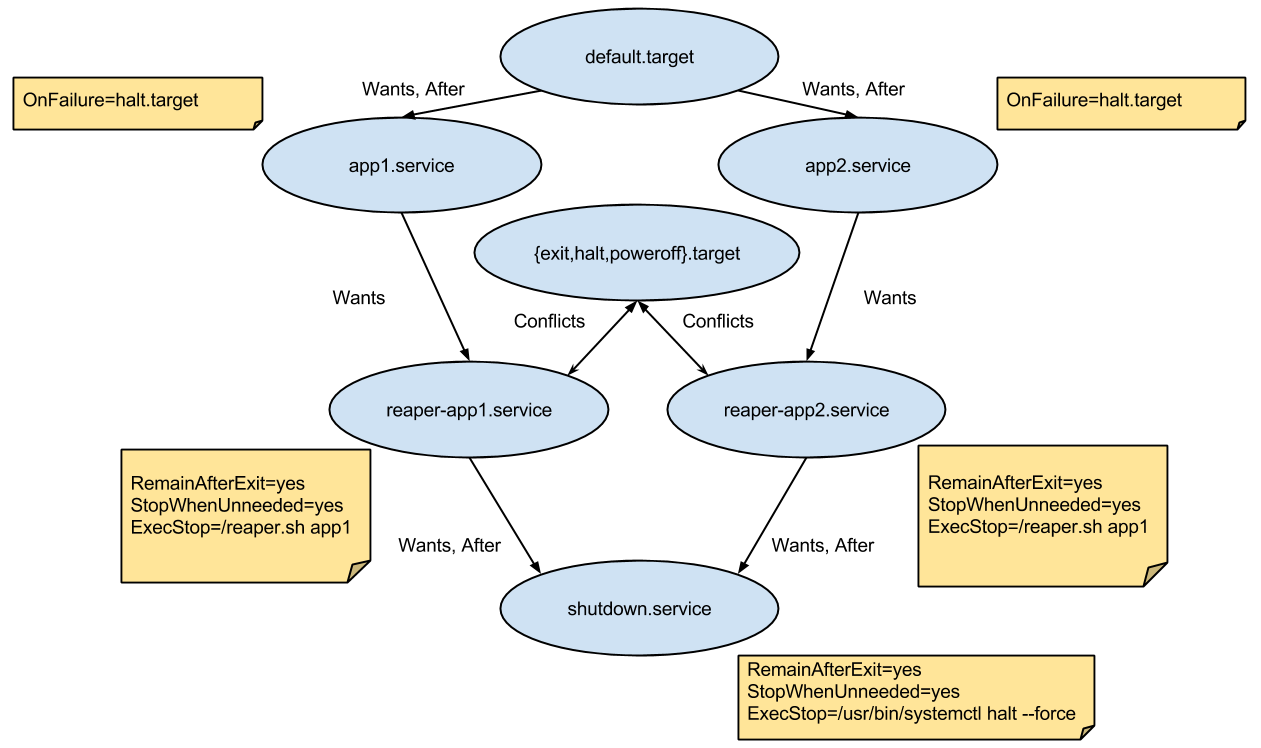
There's a systemd rkt apps target (default.target) which has a Wants and After dependency on each app's service file, making sure they all start.
Once this target is reached, the pod is in its steady-state. This is signaled by the pod supervisor via a dedicated supervisor-ready.service, which is triggered by default.target with a Wants dependency on it.
Each app's service has a Wants dependency on an associated reaper service that deals with writing the app's status exit.
Each reaper service has a Wants and After dependency with shutdown.service that simply shuts down the pod.
The reaper services and the shutdown.service all start at the beginning but do nothing and remain after exit (with the RemainAfterExit flag).
By using the StopWhenUnneeded flag, whenever they stop being referenced, they'll do the actual work via the ExecStop command.
This means that when an app service is stopped, its associated reaper will run and will write its exit status to /rkt/status/${app} and the other apps will continue running.
When all apps' services stop, their associated reaper services will also stop and will cease referencing shutdown.service causing the pod to exit.
Every app service has an OnFailure flag that starts the halt.target.
This means that if any app in the pod exits with a failed status, the systemd shutdown process will start, the other apps' services will automatically stop and the pod will exit.
In this case, the failed app's exit status will get propagated to rkt.
A Conflicts dependency was also added between each reaper service and the halt and poweroff targets (they are triggered when the pod is stopped from the outside when rkt receives SIGINT).
This will activate all the reaper services when one of the targets is activated, causing the exit statuses to be saved and the pod to finish like it was described in the previous paragraph.
Mutable runtime environment
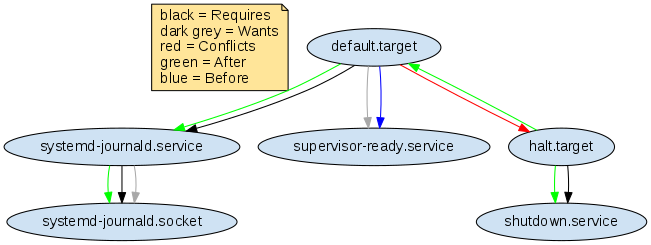
The initial mutable runtime environment is very simple and resembles a minimal systemd system without any applications installed.
Once default.target has been reached, apps can be added/removed.
Unlike the immutable runtime environment, the default.target has no dependencies on any apps, but only on supervisor-ready.service and systemd-journald.service, to ensure the journald daemon is started before apps are added.
In order for the pod to not shut down immediately on its creation, the default.target has Before and Conflicts dependencies on halt.target.
This "deadlock" state between default.target and halt.target keeps the mutable pod alive.
halt.target has After and Requires dependencies on shutdown.service.
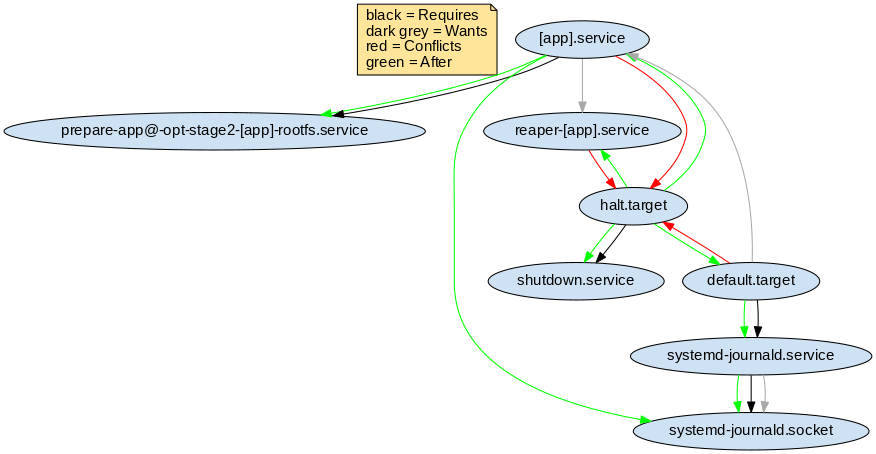
When adding an app, the corresponding application service units [app].service and reaper-[app].service are generated (where [app] is the actual app name).
In order for the pod to not shut down when all apps stop, there is no dependency on shutdown.service.
The OnFailure behavior is the same as in an immutable environment.
When an app fails, halt.target, and shutdown.service will be started, and default.target will be stopped.
The following table enumerates the service unit behavior differences in the two environments:
| Unit | Immutable | Mutable |
|---|---|---|
shutdown.service |
In Started state when the pod starts. Stopped, when there is no dependency on it (StopWhenUnneeded) or OnFailure of any app. |
In Stopped state when the pod starts. Started at explicit shutdown or OnFailure of any app. |
reaper-app.service |
Wants, and After dependency on shutdown.service. Conflicts, and Before dependency on halt.target. |
Conflicts, and Before dependency on halt.target. |
Execution chain
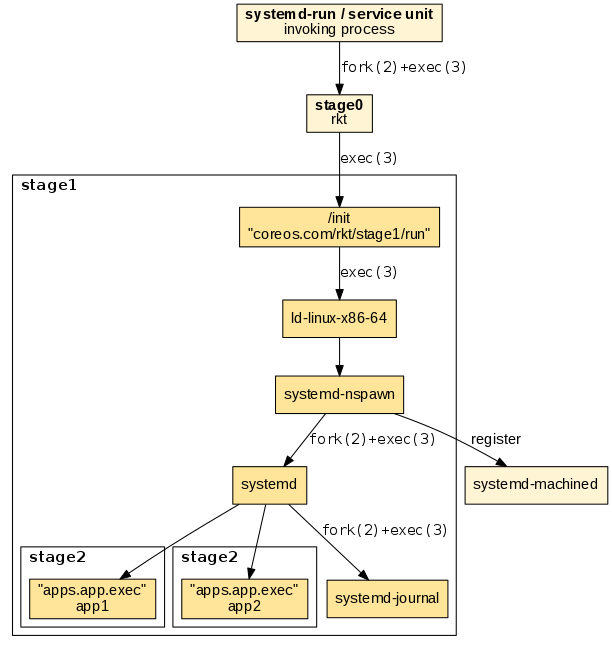
We will now detail the execution chain for the stage1 systemd/nspawn flavors. The entrypoint is implemented in the stage1/init/init.go binary and sets up the following execution chain:
-
"ld-linux-.so.": Depending on the architecture the appropriate loader helper in the stage1 rootfs is invoked using "exec". This makes sure that subsequent binaries load shared libraries from the stage1 rootfs and not from the host file system.
-
"systemd-nspawn": Used for starting the actual container. systemd-nspawn registers the started container in "systemd-machined" on the host, if available. It is parametrized with the
--bootoption to instruct it to "fork+exec" systemd as the supervisor in the started container. -
"systemd": Used as the supervisor in the started container. Similar as on a regular host system, it uses "fork+exec" to execute the child app processes.
The following diagram illustrates the execution chain:
The resulting process tree reveals the parent-child relationships. Note that "exec"ing processes do not appear in the tree:
$ ps auxf
...
\_ -bash
\_ stage1/rootfs/usr/lib/ld-linux-x86-64.so.2 stage1/rootfs/usr/bin/systemd-nspawn
\_ /usr/lib/systemd/systemd
\_ /usr/lib/systemd/systemd-journald
\_ nginx
fly flavor
The "fly" flavor uses a very simple mechanism being limited to only execute one child app process. The entrypoint is implemented in stage1_fly/run/main.go. After setting up a chroot'ed environment it simply exec's the target app without any further internal supervision:
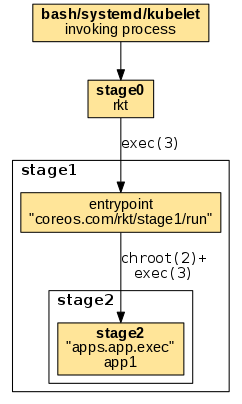
The resulting example process tree shows the target process as a direct child of the invoking process:
$ ps auxf
...
\_ -bash
\_ nginx
Image lifecycle
rkt commands like prepare and run, as a first step, need to retrieve all the images requested in the command line and prepare the stage2 directories with the application contents.
This is done with the following chain:

- Fetch: in the fetch phase rkt retrieves the requested images. The fetching implementation depends on the provided image argument such as an image string/hash/https URL/file (e.g.
example.com/app:v1.0). - Store: in the store phase the fetched images are saved to the local store. The local store is a cache for fetched images and related data.
- Render: in the render phase, a renderer pulls the required images from the store and renders them so they can be easily used as stage2 content.
These three logical blocks are implemented inside rkt in this way:
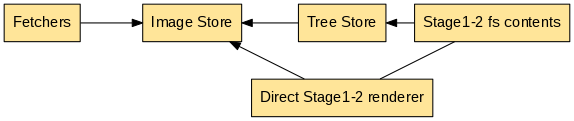
Currently rkt implements the appc internally, converting to it from other container image formats for compatibility. In the future, additional formats like the OCI image spec may be added to rkt, keeping the same basic scheme for fetching, storing, and rendering application container images.
- Fetchers: Fetchers retrieve images from either a provided URL, or a URL found by image discovery on a given image string. Fetchers read data from the Image Store to check if an image is already present. Once fetched, images are verified with their signatures, then saved in the Image Store. An image's dependencies are also discovered and fetched. For details, see the image fetching documentation.
- Image Store: the Image Store is used to store images (currently ACIs) and their related information.
- The render phase can be done in different ways:
- Directly render the stage1-2 contents inside a pod. This will require more disk space and more stage1-2 preparation time.
- Render in the treestore. The treestore is a cache of rendered images (currently ACIs). When using the treestore, rkt mounts an overlayfs with the treestore rendered image as its lower directory.
When using stage1-2 with overlayfs a pod will contain references to the required treestore rendered images. So there's an hard connection between pods and the treestore.
Aci Renderer
Both stage1-2 render modes internally uses the aci renderer. Since an ACI may depend on other ones the acirenderer may require other ACIs. The acirenderer only relies on the ACIStore, so all the required ACIs must already be available in the store. Additionally, since appc dependencies can be found only via discovery, a dependency may be updated and so there can be multiple rendered images for the same ACI.
Given this 1:N relation between an ACI and their rendered images, the ACIStore and TreeStore are decoupled.
Logging and attaching
Applications running inside a rkt pod can produce output on stdout/stderr, which can be redirected at runtime. Optionally, they can receive input on stdin from an external component that can be attached/detached during execution.
The internal architecture for attaching (TTY and single streams) and logging is described in full details in the Logging and attaching design document.
For each application, rkt support separately configuring stdin/stdout/stderr via runtime command-line flags. The following modes are available: * interactive: application will be run under the TTY of the parent process. A single application is allowed in the pod, which is tied to the lifetime of the parent terminal and cannot be later re-attached. * TTY: selected I/O streams will be run under a newly allocated TTY, which can be later used for external attaching. * streaming: selected I/O streams will be supervised by a separate multiplexing process (running in the pod context). They can be later externally attached. * logging: selected output streams will be supervised by a separate logging process (running in the pod context). Output entries will be handled as log entries, and the application cannot be later re-attached. * null: selected I/O streams will be closed. Application will not received the file-descriptor for the corresponding stream, and it cannot be later re-attached.
From a UI perspective, main consumers of the logging and attaching subsystem are the rkt attach subcommand and the --stdin, --stdout, --stderr runtime options.